Generating 3D Visual Programs for Zero-Shot Spatial Reasoning
We introduce pySpatial, a visual programming framework that
equips MLLMs agent with the ability to interface with spatial tools via Python code generation.
3D Reconstruction: We introduce feedforward 3D reconstruction to enhance VLMs' spatial reasoning capabilities.
We use novel view synthsis make the input a explorable 3D scene.
Interpretability: Our system provdies grounded, interpretable, and executable 3D visual programs with verifiable intermediate products.
Performance: Our system achieves state-of-the-art performance on the MINDCUBE and OMNI3D-BENCH benchmarks.
Real-World Applications: We also deploy our agent on a quadrupedal robot to navigate complex environments, showcasing its the potential of realworld applications with purely VLMs.
Multi-modal Large Language Models (MLLMs) have demonstrated strong capabilities in general-purpose perception and reasoning, but they still struggle with
tasks that require spatial understanding of the 3D world. To address this, we introduce pySpatial, a visual programming framework that equips MLLMs with
the ability to interface with spatial tools via Python code generation. Given an
image sequence and a natural-language query, the model composes function calls
to spatial tools including 3D reconstruction, camera-pose recovery, novel-view
rendering, etc. These operations convert raw 2D inputs into an explorable 3D
scene, enabling MLLMs to reason explicitly over structured spatial representations. Notably, pySpatial requires no gradient-based fine-tuning and operates in
a fully zero-shot setting. Experimental evaluations on the challenging MINDCUBEand OMNI3D-BENCH benchmarks demonstrate that our framework pySpatial
consistently surpasses strong MLLM baselines; for instance, it outperforms GPT4.1-mini by 12.94% on MINDCUBE. Furthermore, we conduct real-world indoor navigation experiments where the robot can successfully traverse complex
environments using route plans generated by pySpatial, highlighting the practical effectiveness of our approach.
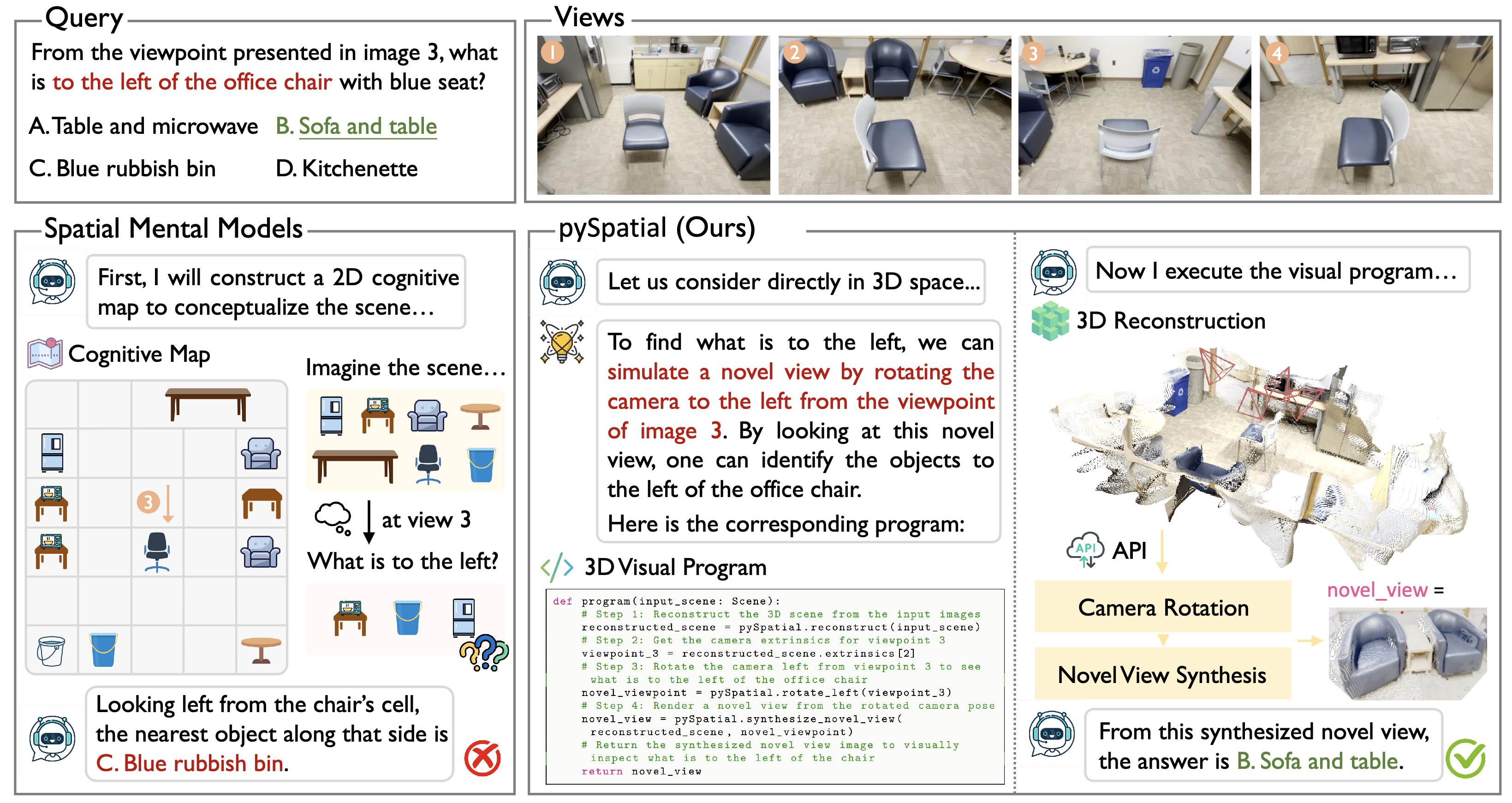
Figure 1:Comparing our pySpatial with spatial mental models for multi-view spatial reasoning tasks. Unlike spatial mental models (Yin et al., 2025), which rely on the implicit imagination of
MLLMs to construct a 2D cognitive map, we introduce pySpatial, a visual programming framework that flexibly composes spatial tools (e.g., 3D reconstruction, camera movements, and novel
view synthesis) to enable MLLMs to explicitly reason in 3D space for diverse spatial reasoning tasks.
Model
Performance Metrics
Method
Reference
Overall
Rotation
Among
Around
Baseline Models
Qwen2.5-VL-3B-Instruct
Bai et al. (2025)
37.81
34.00
36.00
45.20
GPT-4o
OpenAI (2024)
42.29
35.00
43.00
46.40
Spatial Mental Models
Chain-of-Thought
Yin et al. (2025)
40.48
32.00
36.00
58.00
View Interpolation
Yin et al. (2025)
37.81
35.50
36.50
42.80
Cognitive Map
Yin et al. (2025)
41.43
37.00
41.67
44.40
Visual Programming Approaches
ViperGPT
Suris et al. (2023)
36.95
20.50
41.00
40.40
VADAR
Marsili et al. (2025)
40.76
33.50
40.67
46.80
VADAR w/ Recon.
-
35.62
31.00
36.83
36.40
pySpatial (Ours)
-
62.35
41.83
64.89
72.67
Table 1: Performance comparison on the MindCube-1k dataset. The evaluated mental models are based on Qwen2.5-VL-3B-Instruct. VADAR w/ Recon. denotes that we implement VADAR with our 3D reconstruction module. The best results are highlighted in bold, and the second-best are underlined.
Example Analysis & Quantitative Results
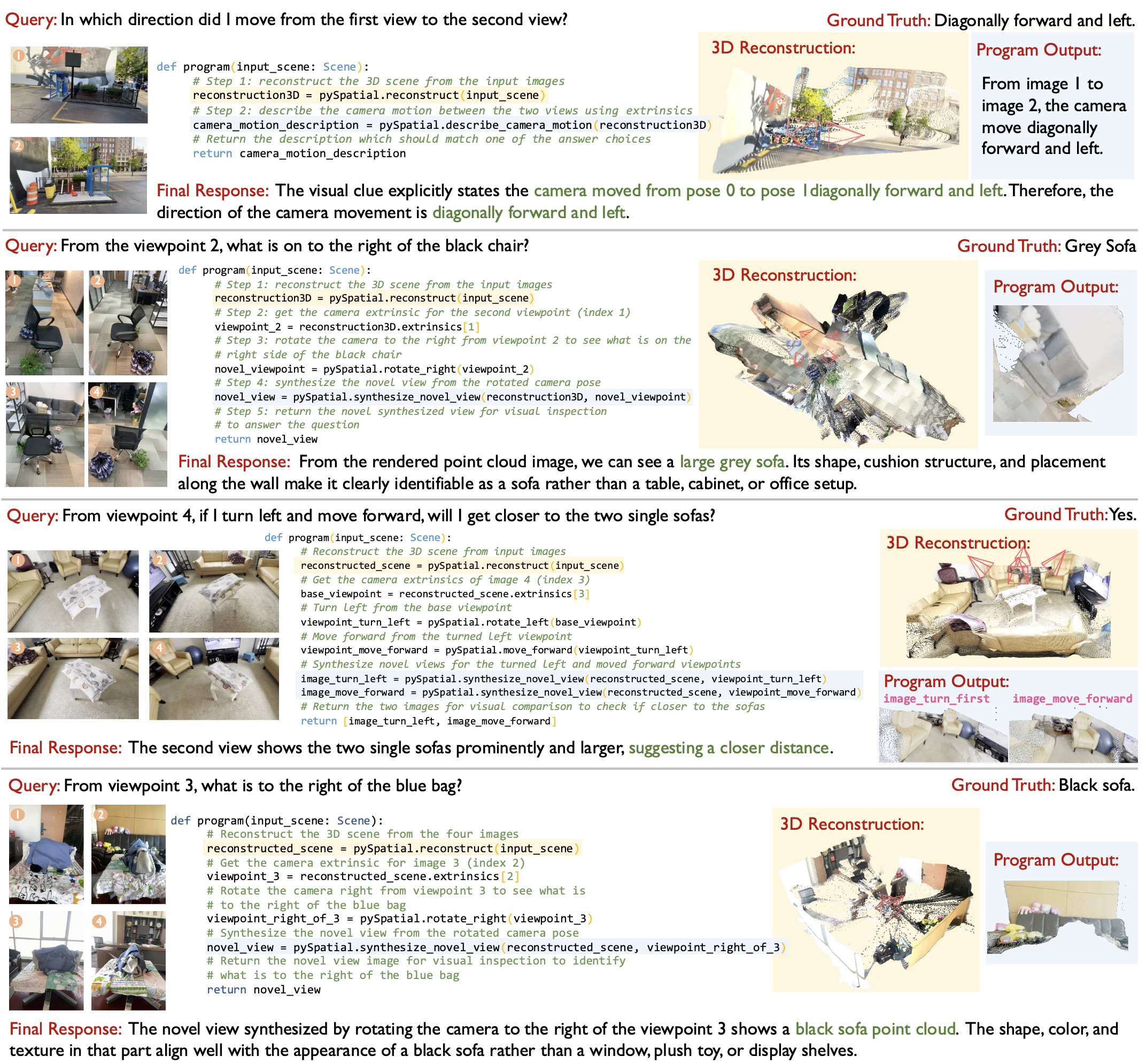
Figure 2:Performance comparison on the full Mindcube dataset. The best results are shown in bold, and the second-best are underlined. Note that we implement pySpatial using GPT-4.1-mini as the code agent for this dataset due to budget constraints.
To further illustrate the capabilities of our pySpatial framework, we conduct qualitative experiments on representative examples from the MINDCUBE benchmark. As shown in Figure 2, each
query is paired with the generated 3D visual program, the reconstructed 3D scene, the program outputs,
and the final response produced by pySpatial. These examples highlight how pySpatial
enables MLLMs to reason explicitly within an explorable 3D scene reconstructed from sparse 2D
inputs. By synthesizing executable and interpretable visual programs that perform operations such
as camera translation, rotation, and novel view synthesis, the framework provides interpretable outputs
that ground the reasoning process in geometric evidence. Across diverse spatial reasoning
tasks, pySpatial produces responses that closely align with ground-truth annotations, highlighting
the effectiveness of our approach. It is worth noting that the generated 3D visual programs include well-structured comments
that capture the reasoning process of pySpatial, thereby providing
transparency and interpretability that researchers can readily verify, debug, or modify
Model
Performance Metrics
Method
Reference
Overall
Rotation
Among
Around
Baseline
Random (chance)
-
32.35
36.36
32.29
30.66
Random (frequency)
-
33.02
38.30
32.66
35.79
Open-Weight Multi-Image Models
LLaVA-OneVision-7B
Li et al. (2025)
47.43
36.45
48.42
44.09
LLaVA-Video-Qwen-7B
Zhang et al. (2025)
41.96
35.71
43.55
30.12
mPLUG-Owl3-7B-241101
Ye et al. (2025)
44.85
37.84
47.11
26.91
InternVL2.5-8B
Chen et al. (2024)
18.68
36.45
18.20
13.11
Qwen2.5-VL-7B-Instruct
Bai et al. (2025)
29.26
38.76
29.50
21.35
Qwen2.5-VL-3B-Instruct
Bai et al. (2025)
33.21
37.37
33.26
30.34
DeepSeek-VL2-Small
Lu et al. (2024)
47.62
37.00
50.38
26.91
Proprietary Models
GPT-4o
OpenAI (2024)
38.81
32.65
40.17
29.16
GPT-4.1-mini
OpenAI (2025)
45.62
37.84
47.22
34.56
Claude-4-Sonnet
Anthropic (2025)
44.75
48.42
44.21
47.62
Specialized Spatial Models
RoboBrain
Ji et al. (2025)
37.38
35.80
38.28
29.53
SpaceMantis
Chen et al. (2024)
22.81
37.65
21.26
29.32
Spatial-MLLM
Wu et al. (2025)
32.06
38.39
20.92
32.82
Space-Qwen
Chen et al. (2024)
33.28
38.02
33.71
26.32
VLM-3R
Fan et al. (2025)
42.09
36.73
44.22
24.45
pySpatial (Ours)
-
58.56
43.20
60.54
48.10
Table 2:Performance comparison on the full MindCube dataset. The best results are shown in bold, and the second-best are underlined. Note that we implement pySpatial using GPT-4.1-mini as the code agent for this dataset due to budget constraints.
Real-World Application
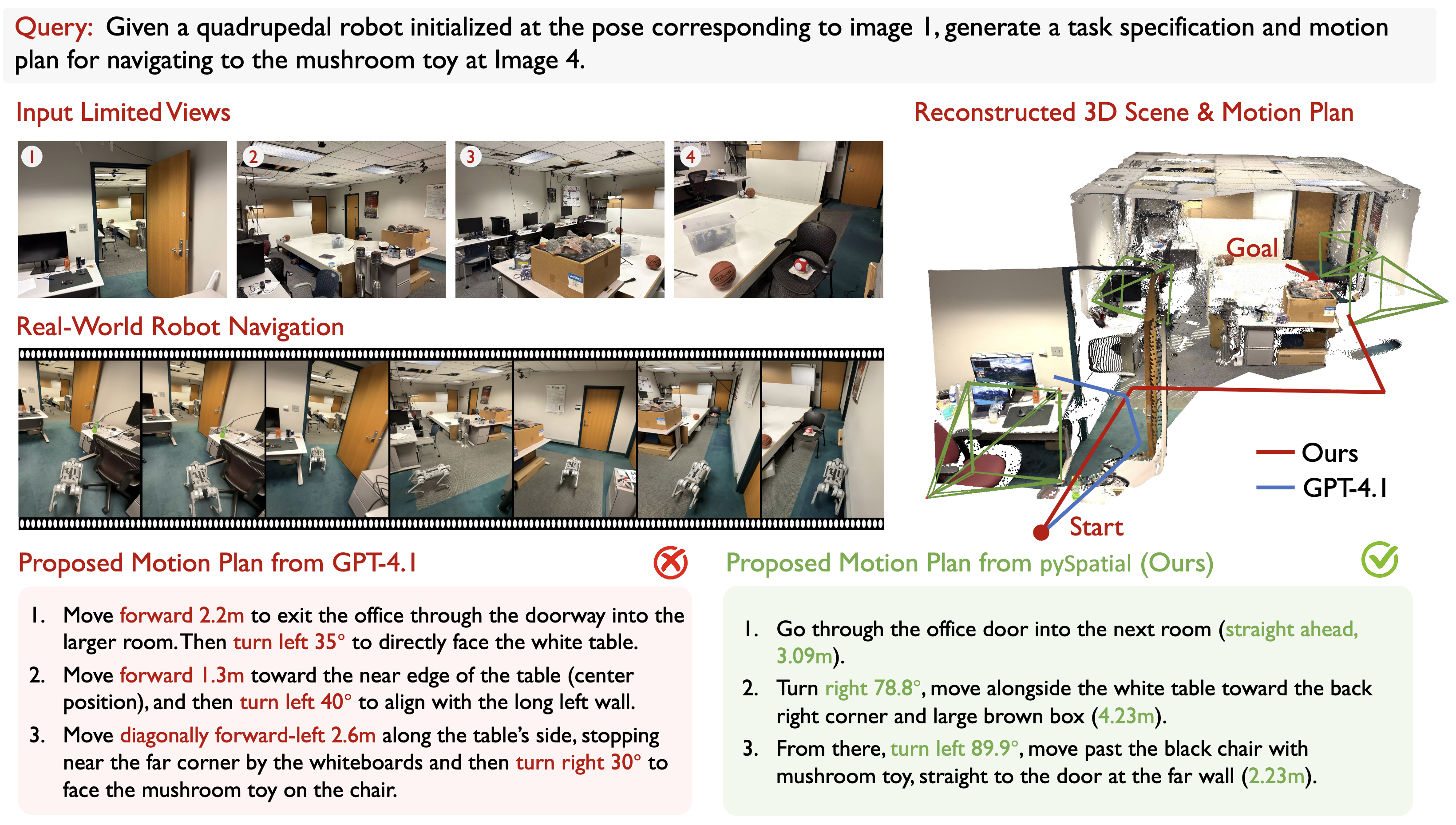
Figure 3:Qualitative results on real-world robot navigation. We deploy pySpatial on a UnitreeGo1 robot to navigate toward a target object (mushroom toy) using limited views as input. The figure
shows the reconstructed 3D scene, motion plans, and physical execution. Compared to the GPT4.1 baseline, which fails due to an incorrect initial turn and produces a collision-prone trajectory, pySpatial generates a geometrically consistent plan that successfully reaches the goal.
To test the potential of real-world deployment using purely MLLMs, we employ a quadrupedal robot with a velocity-tracking controller in a 50 square meter two-room laboratory.
In this setup, the MLLM generates high-level position commands,
which are manually converted into temporal velocity targets that the controller tracks,
enabling the robot to navigate from an initial pose to a target object (a mushroom toy).
From limited 2D views, pySpatial reconstructs an explorable 3D scene, infers camera poses via visual programming, and generates a structured motion plan for the robot to execute.
As shown in Figure 3, our pySpatial successfully guides the robot through doorways,
make correct turns, and finally toward the correct goal location. Notably, the MLLM baseline GPT-4.1
struggles to resolve relative direction such as left-right and fails to provide absolute metric distance estimates,
leading to navigation errors.
In contrast, our agent outputs precise rotations and translations that align with real-world execution,
resulting in reliable task completion. This experiment demonstrates that our approach not only produces coherent spatial
reasoning in question answering benchmarks,
but also transfers effectively to physical robotic platforms for complex indoor navigation tasks.
Conclusion
In this work, we present pySpatial, a visual programming framework that enhance spatial reasoning capabilities of MLLMs
through zero-shot Python code generation. By composing functions
such as 3D reconstruction and novel-view synthesis, pySpatial converts 2D image sequences into
explorable 3D scenes, enabling explicit reasoning in 3D space. Experiments on the MINDCUBEand
OMNI3D-BENCH benchmarks demonstrate that pySpatial consistently outperforms strong
MLLM baselines, with gains of up to 12.94% on MINDCUBE compared to GPT-4.1-mini. Beyond
benchmarks, real-world indoor navigation experiments further validate its practicality, showing that
robots can successfully traverse complex environments using route plans generated by pySpatial.